近年来,虽然包括无人机频谱信号探测技术在内的无人机侦测与反制技术得到了全面发展,但各个技术手段都拥有各自的短板,比如"低小慢"雷达价格昂贵而且应用在城市环境效果有限等缺点,光电红外等探测技术也存在价格昂贵、作用距离以及天气影响严重等不利条件。通过综合考量来看,无线电频谱侦测技术具备一定的优势。无线电频谱侦测设备也被称为被动雷达,不发射信号,不对周围电磁环境产生影响,对天气因素不敏感。
文/范殿梁 公安部第一研究所
田真真 重庆兰空无人机技术有限公司
一、背景介绍
近年来,虽然包括无人机频谱信号探测技术在内的无人机侦测与反制技术得到了全面发展,但各个技术手段都拥有各自的短板,比如"低小慢"雷达价格昂贵而且应用在城市环境效果有限等缺点,光电红外等探测技术也存在价格昂贵、作用距离以及天气影响严重等不利条件。通过综合考量来看,无线电频谱侦测技术具备一定的优势。无线电频谱侦测设备也被称为被动雷达,不发射信号,不对周围电磁环境产生影响,对天气因素不敏感。
实现无人机远距离探测和高精度测向、定位的需求,可以给用户提供足够的预警时间,追踪无人机航迹,研判无人机意图,有利于用户选择正确的反制手段。本文将重点讨论利用无线电频谱侦测技术实现对无人机的远距离探测和高精度测向,并结合某无人机科技公司研发的LK-WDF001无人机频谱侦测设备进行工程应用说明。
二、远距离探测技术
通过提高探测天线和接收机的灵敏度、优化弱小信号捕获识别算法等技术手段,都可实现对无人机信号进行远距离探测的目的,但由于接收机灵敏度在同一中频带宽下基本相差无几,因此目前主要以提高侦测天线灵敏度和优化弱信号检测技术为技术方向。
当前大多数频谱设备采用全向天线进行信号探测,但全向天线增益有限,无论如何优化设计,其增益大多在2dBi左右,探测距离大多在2Km左右(以大疆精灵系列为测试对象)。为解决天线增益有限的问题,某无人机科技公司LK-WDF001无人机频谱侦测设备设计使用增益高达12dBi的定向喇叭天线进行空域探测,在同样信号幅度下,探测距离相对全向探测提高近3倍。图1所示1GHz~6GHz全向双锥无源天线增益仿真图和天线外观图,从增益曲线可看出在6GHz以下频段,天线增益大多在2dBi左右。
图1 双锥天线增益仿真曲线截图
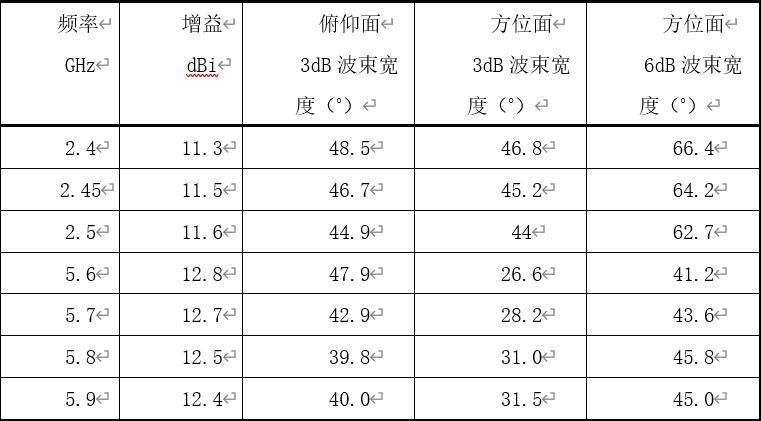
如表1所示定向监测天线的增益测试记录表,从记录参数看出,在2GHz~6GHz频段,增益基本在11dBi~12dBi。
表1 定向喇叭天线增益测试表
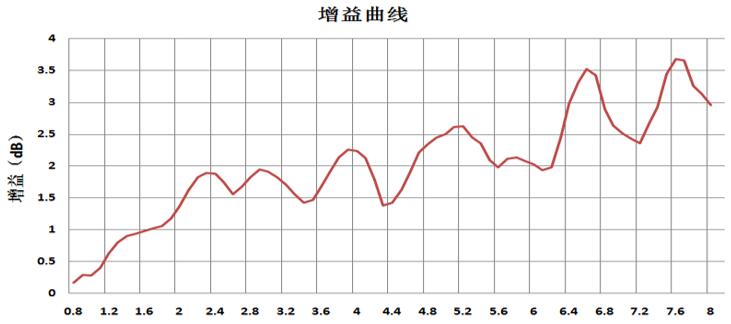
图2 喇叭天线2.45GHz频点增益曲线图
图3 喇叭天线5.75GHz增益曲线图
从以上内容得出:喇叭天线增益高出全向监测天线增益平均9.5dBi。根据无线信号空间衰减模型:Ls(dB)=32.4+20Lgf(MHz)+20LgD(km)来计算,假设作用距离增加n倍,则9.5=20lgn,反对数计算出n=3倍,也就是说明增益高9.5dBi的喇叭侦测天线,其作用距离是全向双锥侦测天线作用距离的3倍。
LK-WDF001设备预计侦测距离为10Km,理论推算如下:
图传信号传播路径如图4所示,图传信号通过全向天线发射,然后通过空间传播至接收天线,接收天线后级是测向开关矩阵,一般对信号做放大及选择输出,最后通过射频电缆至测向接收机。
图4 图传信号传播路径
无线信号空间传播的能量衰减很大,衰减值与信号频率和传播距离相关。空间衰减模型公式:
Ls(dB)=32.4+20Lgf(MHz)+20LgD(km) (式1)
以常见的大疆无人机为例,其5.8GHz图传信号幅度为100mW(127dBμV,EIRP),通过10km的理论信号衰减值为:
Ls(dB)=32.4+20Lgf(5800)+20LgD(10) (式2)
计算结果为:
32.4+75.3+20=128dB (式3)
通过计算得知:5.8GHz无人机图传信号通过10km的空间传播,达到接收天线口面的信号电平为:
127-128=-1(dBμv) (式4)
到天线接收天线口面信号为-1dBuv,设备使用11~12dBi高增益定向喇叭接收天线,取最小增益G1=11,则信号幅度为-1+11=10dBuv;假设天线输出后,因为电缆和开关的损耗,预计为3dB,则到达接收机信号为:
10-3=7dBμv。
根据对LK-WDF001侦测设备灵敏度测试,6GHz频段灵敏度为-100dBm(25KHz分辨率条件下测试),即7dBμv,信号刚好满足最低灵敏度要求,估计自动探测及识别有一定困难。因此需要将天线接收信号接入低噪放电路,低噪放设计增益11dB,开关矩阵噪声系数5,则系统灵敏度提升6dB左右,有助于信号的自动探测和信号识别功能。
若5.8GHz可以探测10Km,则因为频率差2倍多,2.4GHz空中传播导致信号空中衰减量比5.8GHz少7dB。而且因为定向探测天线在2.4GHz频段增益为9-12dBi,同样取最小增益9dBi。因此,空间衰减减少的7dBi,理论上可以使2.4GHz探测距离推到20Km左右,但因为2.4GHz复杂的电磁环境,往往要牺牲10dB左右的接收机灵敏度,所以对2.4GHz的10Km侦测距离仍然是可行的。
定向侦测天线虽然作用距离远,但该方案是牺牲侦测空域大小来实现的。若只用一副天线进行探测则有很大空域无法被有效侦测。为解决这一问题,LK-WDF001采用8元阵列侦测天线来解决这一问题,8个喇叭天线分别对各自空域进行无人机探测搜索,这样既保证了探测距离也保证了360°空域的有效侦测。
三、线性检测方法
除了提升硬件系统灵敏度外,LK-WDF001还采用了微弱信号检测技术来提升设备的信号捕获和参数识别功能。微弱信号的检测方法按照检测算法的不同可以划分为非线性检测方法和线性检测方法。线性检测方法主要包括:相关检测(自相关检测和互相关检测)、锁定放大法、取样积分法、小波变换等。非线性检测方法主要包括:混沌方法、随机共振、高阶谱分析、神经网络等方法。
本文主要对线性检测方法中的采样积分方法进行简单说明。在LK-WDF001研制工程中,采用了该方法应对弱信号采集,牺牲一定的时间,提高信号参数识别的准确性和可靠性。整个信号的采集过程以及积分原理如图5所示,接收模块将射频信号下变频为中频信号,在对中频信号的数字化采集过程中进行多次采集并积分,由此提高信噪比,从而有助于对信号参数的识别和计算。
图5 信号采集积分原来流程框图
对于天线接收到的射频信号,首先对其进行预滤波,然后依次通过混频器、中频放大器进行处理,得到混有噪声n(t)的信号x(t)=s(t)+n(t)。参考信号r(t)是与有用信号s(t)同频的信号,经过延时t0后形成取样脉冲。作用到取样开关K,实现对输入信号x(t)=s(t)+n(t)的取样,接取样信号经过积分器进行多次积分平均后输出,便得到取样积分信号。
经过n次积分平均,则输出信号

为

(式5)
对于白噪声形式的背景噪声,由于不同时刻噪声值不相关,则有
(式6)
故输出信号 可以简化表示为

(式7)
可见虽然经过多次采集和积分,但数字中频信号依然保留中频信号S(t0)的参数特征。
四、高精度测向
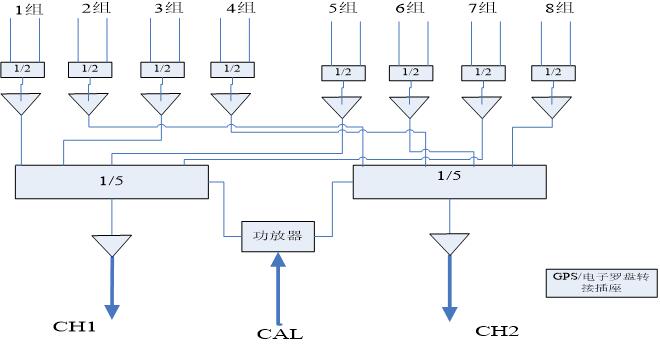
由于无人机探测设备针对的频率包含有5GHz以上频段,在这个频段采用相位法测向很难取得满意的测向效果。因此,LK-WDF001设备复用全空域监测阵列,通过幅度关系来进行目标信号的方位计算。信号选择流程如图6所示,1号对周和1号喇叭通过一个二选一开关选通,再经过一个低噪放电路输出,其他7组天线同样输出。输出的8组信号经过2个五选一开关输出两路信号,输出至测向接收机。
图6 侦测、测向天线矩阵原理框图
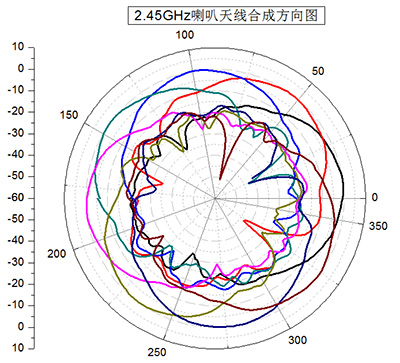
两层天线阵列在空间上错开,上下安装,喇叭测向阵列在下层,对周测向整列在下层。天线内部安装结构以8个喇叭天线合成阵列天线方向为例如图7、图8所示(暗室测试,选择两个代表性频点为例)。
图7 测向阵列在2.45GHz频点的合成方向图
图8 测向阵列在5.8GHz频点的合成方向图
通过上面合成方向图看出:当目标信号从某一个方向入射天线阵列时,每个喇叭接收到的幅度值差异明显。而且信号入射方位与幅度分布具有唯一映射关系。利用这个唯一映射关系就可以通过信号幅度的分布关系求取信号入射方位。常规的幅度相关工程实现方法,通过电子开关分别选通1#~8#天线,采集目标频点信号带内平均功率 ,获取了8个天线接收的平均功率值后,该组数据与样板库相同频点数据 进行比对求取相关系数,哪组数据相关系数最大,则该组数据对应的方向值就是来波方向值。
相关系数计算公式如式8所示:
(式8)
但是,在实际的工程应用上我们发现,高增益定向天线组成的测向阵列由于天线元强烈的方向特性,在对远距离目标信号进行信号采集时,预计很多天线元并不能接收到信号。如果这种情况下仍然引入8个天线幅度去进行相关系数计算,反而导致测向不准确,甚至完全无法使用。
基于这个原因,我们研究开发了相邻幅度法测向算法,通过结合数据筛选和数据统计方法实现对无人机图传信号的精确定向。同时,通过累计幅度统计方法,在基于低成本的硬件架构上实现了对遥控器等高速跳频信号的测向。根据上述方法设计开发的LK-WDF001无人机侦测设备外场实测探测距离达到8Km以上,测向精度达到3°左右,达到国内领先水平。
五、结语
随着无人机科技的发展,无人机反制技术与无人机技术作为矛和盾的关系一直在交错前进。消费机无人机缺乏有效监管手段,导致黑飞现象频发,甚至利用无人机从事要地拍照侦察、边境走私等非法活动,给国家安全和人民生命财产安全造成重大威胁。本文对无人机反制技术频谱侦测中的远距离探测技术和高精度测向技术进行了初步研究,通过综合运用理论分析、结构设计、模型搭建、数据仿真等方法,初步实现对远距离探测技术和高精度测向技术的探索,为后续无人机反制技术的推进起到了有益的作用。