文 / 翁其艳 林鹿宁 史治国 陈积明 浙江大学信息学部
一、引言
随着无人机技术的发展,无人机相关产业发展迅猛,无人机的应用场景日益丰富。在众多的无人机应用中,民用无人机低空通航是一项极富前景和想象力的产业。但是,相比于地面的车辆而言,低空的飞行器具有更加严重的潜在安全威胁,没有有效监管就没有安全飞行。因此,无人机低空通航新产业的发展以及飞联网的建设都应以低空无人机的有效监管为前提。低空飞行器的主要威胁在于它们有可能对人、财产和基础设施进行直接的物理攻击,如近几年发生的多起无人机坠落伤人、空中劫难事件。此外,无人机还可用于接近网络物理系统附近执行网络攻击,如劫持、欺骗和嗅探等。另一种方式是窃听可能包含私人信息的无线信号,例如,无人机可以降落在建筑物上嗅探人们家中的无线信号,捕捉包括MAC地址、接收信号强度 (Received signal strength indication, RSSI)和启用WiFi设备的制造商名称的时间戳,从而识别和跟踪公共空间中的个人[1] 。这些场景中,让人们的身体健康和隐私权均会受到严重威胁。
在政策层面,虽然国家和各级地方政府的相关部门从生产制造、飞行动态数据、公共安全等方面出台了多项管理条例来加强无人机监管,但是在无人机真正走向大众应用的低空通航时,除了对低空无人机的监管法律法规需要不断健全之外,更是迫切需要使用大范围覆盖的低空无人机飞行状态和动态监测的有效技术手段。虽然现有民航系统的ADS-B和ADCRS等已经较为成熟,但都是基于无人机合作式主动上报的,而从监管角度看,大范围城市低空的非合作小型无人机的监测定位手段尚不成熟。
2020年10月,中国民航局公布了国内首批13个民用无人驾驶航空试验基地,其中杭州作为浙江省唯一代表入选。在相关规划中,浙江杭州航空试验基地是以城市为应用场景的无人驾驶航空试验区,该基地将重点探索无人机在城市物流、应急医疗配送、智能亚运和应急保障等城市场景中的应用。在2021年2月26日,国家民航局召开的通用航空工作领导小组第六次全体会议指出,要“进一步扩大无人机物流配送试点范围”“推广应用通航新技术,鼓励发展低空旅游、娱乐飞行等通航新业态”,构建以国内大循环为主体的通航发展新格局,实现高水平独立自强和对外开放,努力提高通航这一战略性新兴产业的承载力、影响力和带动力。这为城市场景低空无人机感知方案的提出提供了战略支持。
本文首先围绕低空无人机的监测手段展开综述,介绍了现有的无人机检测跟踪定位方法、融合方法和系统,然后分析了5 新基建开展低空无人机检测的可能性及其关键技术,最后探讨了其在相关技术方面面临的问题和挑战。
二、无人机监测方法
近年来,面向“低小慢”民用无人机的检测、定位与识别已成为一个研究热点,目前的技术手段主要包括基于被动射频信号、声学信号以及视频信号处理的方法和基于主动雷达的方法,或者采用多种方法进行融合。
1. 射频信号
市场上现有的无人机或定制的无人机通常在一些特定的频段与其控制器通信,最常见的如2.4GHz和5.8GHz。然而,在实际环境中,许多其他射频信号的存在会干扰无人机射频信号的检测,例如与无人机共享相同频带的无线网络。
为了解决这个问题,一种简单的方法是监控大范围的射频信号,并将任何未知射频信号的发射器判定为无人机。由于未知的射频发射器不一定是无人机,这种方法会导致很高的误报概率;另一种可行的办法是识别无人机的媒体访问控制(Mediumaccess control,MAC)地址[2],但是这种方法只能检测 MAC 地址开放的无人机。由于无人机的种类越来越多,建立和更新无人机 MAC 地址的数据库变得越来越困难。此外,无人机的MAC地址很容易被伪造。
提取射频信号的特征是目前来看较为可行的方式。这一般包括两种思路:一是分析遥控器发出的上行信号,通过识别遥控信号的跳频特征来判断无人机;另一个是关注无人机发出的下行图传信号,将提取的信号波形和数据库中的不同无人机的信号波形进行互相匹配来检测识别一些常见的无人机类型。基于射频信号的无人机定位,可以采用基于接收信号强度[3]和波达方向[4]测量等方式,定位中必须考虑可能存在的多径和非视距传播问题。
2. 声学信号
声学信号检测是无人机检测和定位的另一种低成本的方法。在无人机飞行过程中,电机和快速旋转螺旋桨产生的声音可以通过配备声学传感器的系统采集用于无人机的检测、分类和定位[5]。无人机的声学特征一般从频域分析获得。不同型号的无人机具有不同的基频和谐波特征,可在频域中不同的频带产生尖峰。通过经典的机器学习算法,如支持向量机或者深度学习算法,可以有效学习该特征,实现检测识别功能。为了获得检测到的无人机的位置,可以使用阵列信号处理算法(例如,多信号分类(Multiple signal classification, MUSIC)和波束形成方法)来估计声学信号的到达方向(Directionof arrival,DOA),也可以使用基于到达时间差的优化问题求解方法定位出无人机的空间坐标。然而,声学监控对环境噪声很敏感,并且检测范围有限,其受制于无人机的类型和测试环境。
3. 视频信号
基于视频图像的无人机检测本质上是计算机视觉和模式识别领域的一个目标检测问题。可以根据物体的外观特征,即颜色、轮廓线、几何形状、边缘、在连续帧上的运动特征等来检测物体[6]。在没有运动信息的杂乱背景中,基于外观特征的方法很难将无人机与其他类似的小物体(例如鸟类)区分开来。通过比较连续的图像,可以通过帧间差分等方法画出物体运动轨迹,并以此确定移动对象的位置和移动方向[7] 。有人建议通过观察飞行模式来区分无人机和鸟类,因为鸟类的飞行模式比无人机更随机。然而,当鸟在滑行时,这种方法可能会失败。因此对于无人机检测,可以结合运动特征和外观特征两种方式进行。进一步地,可以利用核相关滤波等跟踪算法对无人机进行实时跟踪监视。
4. 雷达信号
雷达适用于探测和跟踪大型飞机,但在探测和跟踪小型无人机方面,由于小型无人机的雷达截面较小且通常在低空低速飞行,雷达监测面临严峻的挑战。即便如此,雷达监视在探测和跟踪无人机方面还是有希望的。实验已经证实,通过分析由多基地雷达获得的微多普勒特征,可以改善杂波 / 目标辨别结果,从而实现高精度的无人机检测和跟踪[8] 。有实验表明,用DJI Phantom2进行的一系列测试,雷达的探测范围几乎不超过3000米[9] 。需要注意的是,雷达是一种全天工作的高电磁能有源传感器,因此在拥挤的城市地区部署大功率雷达可能是不合适的,甚至是被禁止的。
5.融合系统
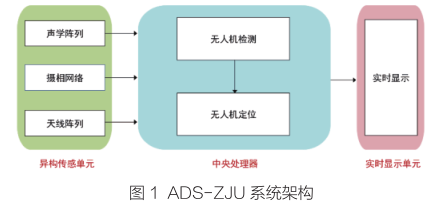
基于上述定位手段,目前已有集中商用/军用的无人机监测系统。有些系统只包含一种检测手段,例如,Orelia无人机探测器是一种基于声学的探测器,能够探测固定翼和旋转翼无人机,当背景噪声小于40dB时,其检测范围可达100m;Rohde&Schwarz发明的ARDRONIS基于射频信号监测,探测范围可达1km-2km。有些系统则结合了多种检测手段,例如 DroneDetector系统结合了声学和射频信号进行检测,检测范围可以达到1公里;Dedrone的DroneTracker结合了麦克风、光学摄像头和WiFi传感器,可以探测到500m 范围内的无人机;DroneShield5提供集成的检测和防御解决方案,它集成了雷达、声学、视频和射频技术进行无人机检测,检测距离可达 1.5km;Falcon shield 利用雷达、视频和射频三种监视技术,可以实现无人机探测、定位和防御。来自浙江大学的研究团队开发了一个名为 ADS-ZJU 的反无人机系统,它结合了三种技术,即声学、视频和射频[10]。如图1所示,它由三个部分组成 : 异构传感单元、中央处理器和实时显示单元。ADS-ZJU 系统架构如图1所示。
(1)异构传感单元:采用声学、光学和射频三种传感器来捕获无人机的信息。声学传感器分两个阵列部署,每个阵列呈四面体形状,带有四个声学传感器。光学传感器由一个全景相机和三个云台相机组成,相机之间可以通信协作。射频传感器摆成 L型的阵列,可以接收10MHz~6GHz范围内的射频信号,声音信号、视频图像和射频信号将通过这些传感器收集并发送到中央处理器。
(2)中央处理器:它是ADS-ZJU系统的核心部分,它进行无人机特征提取、无人机检测和无人机定位。
(3)实时显示单元:可以实时显示检测结果、目标的三维定位结果、历史轨迹和实时视频监控画面。
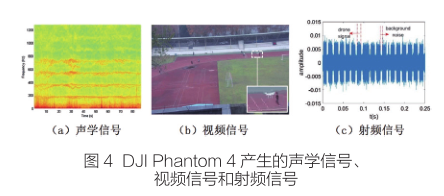
在中央处理单元,首先基于异构传感单元接收的声学信号、视频信号和射频信号分析提取无人机的特征。对于声学信号,通过短时傅立叶变换(Short-time Fourier transform,STFT)提取其频谱特征。图4(a)为DJI Phantom4产生的声学信号的 STFT 结果。在这个图中,横轴表示时间,纵轴表示频率,不同的颜色代表不同频率的声学信号的强度,单位为分贝(dB)。进一步的处理可以得到DJI Phantom 4声学信号的基频(180Hz左右)和谐波强度,谐波的强度虽然互不相同,但它们的分布相当稳定。因此,我们将谐波强度的分布作为无人机的声学特征。对于视频信号,采用时空特征融合的方法提取双通道光流特征来描述无人机的图像特征。为提取图像的稀疏光流特征,需要进行的操作涉及特征角点提取、时序特征提取和多通道卷积。对于射频信号,使用频谱分析仪来分析所测无人机 DJI Phantom 4 与其控制器之间的通信特性,对于采集到的时域波形,遥控器发给无人机的信号是跳频的,能量很小,而无人机发给遥控器的波形是周期的固定频率的。
在完成无人机特征提取后,需要检测是否存在无人机。音频检测采用的是传统的支持向量机分类模型,视频检测使用的是深度神经网络,射频检测则是采用与数据库中的波形进行互相关操作来实现。在得到三种传感器的检测结果后,为了提高检测性能,该系统设计了决策级融合算法,基于三种传感器的检测性能估计,通过广义似然比检验,得到系统最终的检测结果。图5显示了检测结果在视频画面中的呈现,在一些复杂背景下,均能得到较好的检测结果。
如果探测到无人机,将从接收到的声音信号、视频图像和射频信号中提取位置相关信息,用于无人机定位。根据声信号,可以通过到达时间差定位算法估计无人机的三维坐标;从射频信号中,可以获得相对于射频传感器的信号强度和波达方向测量图 2 异构传感单元(从左到右依次为声学传感器阵列、光学相机和射频传感器)图3传感器采集数据发送到中央处理器过程示意图(以声学信号为例)图4 DJI Phantom 4产生的声学信号、视频信号和射频信号值;从视频图像中,虽然很难准确估计出被检测无人机与摄像机之间的几何关系,但可以确定无人机飞行在摄像机视野范围内的特定地理区域,这可以作为无人机定位的附加信息。
三、5G/B5G开展低空无人机检测的关键技术
作为新基建国家战略“领跑”的5G/B5G技术,可以实现对城市区域的有效覆盖,如果可以让5G/B5G网络基础设置在提供通信解决方案的基础上,增加对低空无人机的感知、定位和识别能力,那么一方面将提高5G/B5G基础设置的投入产出比;另一方面也为低空通航的有效监管提供了低成本广覆盖方案。
在5G通信系统中,利用毫米波频段、大规模天线技术和超密集蜂窝都被认为是提高网络容量的关键方法,同时它们对于感知定位性能的提升也极具潜力:毫米波频段的带宽优势可提高感知的距离分辨率,可使目标检测和定位得到极大的性能提升;大规模天线提供了良好的角度分辨率,使基于到达角(Angle of arrival, AOA)的定位方法可以获得很好的性能提升;超密集蜂窝使得系统定位的锚点更密,从而获得更好的定位精度。此外,智能反射面(Reconfigurable intelligent surface, RIS)作为B5G通信系统的关键候选技术之一,通过主动调控无线信道的方法不仅在提升通信传输速率方面得到了广泛认可,而且也在包括城市复杂非视距(Non-line-of-sight, NLOS)环境下的定位方面开始得到了关注。
如图7所示为使用5G/B5G对低空无人机实现感知、检测、定位的场景示意图。在城市场景中讨论5G/B5G基站对低空无人机的定位流程如下:天图5无人机在不同场景中的检测实验图6基于5G/B5G网络的通信和无人机感知一体化系统场景示意图线基站发射的通信感知一体化波形信号,一方面可以作为通信信号用于和终端之间的通信;另一方面也可以作为雷达信号用于检测无人机和积累对周围电磁环境的信息收集,从而提高环境感知的能力。在具体工作时,对接收信号的分析和处理可以检测环境中是否存在无人机,并进行初步的定位。当某个基站检测到疑似目标时,可以发送信号调动周围基站进行协作检测,从而增强检测能力。此时,令首个检测到疑似目标的基站为主基站,主基站将初步估计的目标距离和方位发送给邻基站。如果目标方位在视距内,则被叫的邻基站直接对准目标方向发射信号,如果目标方位不在视距内,则可以调控环境中的智能反射面,改善信道,实现非视距传播。邻基站根据各自接收到的数据进行本地处理,再将检测结果通过5G无线通信方式发送给主基站,由主基站对所有邻基站的数据进行融合处理。
对于上述设想场景的实现面临几个方面的技术挑战。首先,为了检测空间中是否存在无人机,需要考虑在复杂背景下如何将包含无人机的信号与背景环境进行解耦,这要求建立面向无人机感知的无线信号传播模型,提取其中通信、感知、定位所需的信号特征,并考虑在实际动态、电磁参数难以确定的三维场景中模型的快捷计算。其次,需要设计通信感知一体化波形集,使其既有利于环境中终端之间的通信,又能高效感知空间中的不同电磁环境,并且要克服通信、感知的相互干扰影响。再次,如何充分利用毫米波通信、大规模 MIMO、智能反射面等新技术,使用5G基站协同进行分布式定位与融合识别。
为达到预期目标,目前5G/B5G系统还存在以下三方面的主要研究问题:
1. 准确的信道时空特性是通信也是感知应用方案设计和性能保障的前提。如何在城市复杂动态场景为通信和感知一体化设计的5G/B5G系统提供准确的信道时空特性,既满足传统通信的需求也满足高精度感知应用的需求?
2. 通信感知一体化波形是在5G/B5G系统复杂干扰环境中实现通信和感知双重功能的核心。如何对5G/B5G通信波形进行有效的针对性设计,才能使其在复杂干扰环境中具备与信道空时频特性相应的捷变抗干扰能力?
3. 利用5G/B5G网络基础设施构建城市低空感知网络需要充分挖掘多基站间的协作感知能力。如何利用城市中大量分布的5G基站进行联合感知,才能在城市低空复杂电磁环境中实现高精度的无人机感知?
基于以上问题,让基站充分利用平时与大量时空随机分布的终端,运用在通信过程中累积的信道测量信息以及目前网络规划中使用越来越多的三维地图信息是解决上述第一个问题的关键:借助三维地图信息和计算电磁学的方法可以对信道环境做出基本估计;而利用机器学习的方法,累积的信道测量信息可以帮助进一步减小理论模型的误差。为了解决上述第二个问题,通信感知一体化波形设计既要考虑信号的波形集设计,也要考虑发射策略设计:前者从信号自/互相关副瓣抑制、频域限制等方面革新和优化波形;后者重点围绕一体化波形的波束成形策略以及通信与感知信号间的干扰抑制。在解决上述第三个问题时,为充分利用多基站分布式观测的优势,可以考虑采用信号级融合、特征级融合或
决策级融合的协作感知方案,但具体设计时需要考虑性能和传输开销间的平衡问题。
四、结语
结合对“低小慢”民用无人机、非合作小型无人机检测和定位的需求,本文对现有的无人机检测方式及融合系统进行了比较全面的综述,并探讨了5G 新基建开展低空无人机检测的可能性、关键技术及面临的挑战。
参考文献:
[1]I.Guvenc,F.Koohifar,S.Singh,et al.,"Detection,Tracking,and Interdiction for Amateur Drones,"IEEE Communications Magazine,vol.56,no.4,pp.75-81,April 2018.
[2]M.Peacock and M. N. Johnstone,“Towards detection and control of civilian unmanned aerial vehicles,”Proc.14th Australian Information Warfare and Security Conf., Edith Cowan University, Perth, Western Australia, pp. 9–15, Dec. 2013.
[3]F.Khelifi,A.Bradai,K.Singh,et al.,"Localization and Energy-Efficient Data Routing for Unmanned Aerial Vehicles: Fuzzy-Logic-Based Approach," IEEE Communications Magazine,vol.56,no.4,pp. 129-133, April 2018.
[4]H.Fu,S.Abeywickrama,L.Zhang, et al., "Low-Complexity Portable Passive Drone Surveillance via SDR-Based Signal Processing," IEEE Communications Magazine, vol.56,no.4, pp.112-118, April 2018.
[5]X.Yue, Y.Liu, J.Wang,et al.,"Software Defined Radio and Wireless Acoustic Networking for Amateur Drone Surveillance," IEEE Communications Magazine, vol. 56, no. 4, pp. 90-97, April 2018.
[6]Z.Zhang,Y.Cao,M.Ding, et al., “An intruder detection algorithm for vision based sense and avoid system,”Proc. IEEE ICUAS, Arlington, VA, USA, pp. 550–556, Jun. 2016.
[7]邵盼愉.基于视觉的无人机入侵检测与跟踪系统设计与实现 . 浙江大学 ,2018.
[8] F.Hoffmann,M.Ritchie,F.Fioranelli,et al., "Micro-Doppler based detection and tracking of UAVs with multistatic radar," 2016 IEEE Radar Conference, Philadelphia, PA, USA,2016, pp. 1-6.
[9]J.Farlik,et al.,“Radar cross section and detection of small unmanned aerial vehicles,” Proc. 17th IEEE Int’l. Conf.Mechatronics–Mechatronika, Prague, Czech Republic, Dec. 2016, pp.1–7.
[10]X.Shi,C.Yang,W.Xie,et al.,"Anti-Drone System with Multiple Surveillance Technologies: Architecture,Implementation, and Challenges," IEEE Communications Magazine, vol.56,no.4,pp.68-74,April 2018./