摘要:随着人工智能技术的发展,警用巡逻机器人的发展逐渐崛起。随着应用场景的增加和适用环境的日益复杂,警用巡逻机器人的导航技术越来越受到挑战。现有的导航方法,如磁条,激光,GPS等,明显缺乏环境的适应性和稳定性。3D激光雷达在警用巡逻机器人导航中的应用,提高了机器人的导航性能。因此,在介绍三维激光导航技术应用原理的基础上,分析了三维激光导航技术的特点和优势,阐述了其适应性和稳定性。
随着社会经济的发展,大型客流,如超市,机场,车站,会展中心和物流仓库的规模不断扩大,数量不断增加,大中型城市的高水平、高档次商业优势不断增强,安全自动化的需求越来越迫切。巡逻机器人是一个多功能集成系统,它可以感知环境,进行规划路线,做出动态决策,进行行为控制并伴随
报警装置。为了保证场所的安全,可以利用机器人对场所进行定点
监视或不间断地巡逻监视。目前,巡逻机器人在安全工作中发挥的作用越来越重要,对它的研究也越来越受到国内外的关注。它已成为服务机器人的一个新的研究方向。警用巡逻机器人的应用和发展日新月异,各类警警用巡逻机器人广泛应用于安全,消防,拆除,侦察,反恐等领域,对维护国家公共安全具有重要意义。
1激光雷达简介
激光雷达是感受外界环境的传感器,传感器指的是可以根据某些规律变换待测量信息然后输出的检测装置。它是感受外部环境的重要硬件。它主要分为视觉,位置感,速度感,力感,触觉感,例如高速摄像头等[1]。视觉输入系统,如摄像头和3D激光雷达,激光扫描仪等环境视觉输入系统。在智能设备中,传感器相当于诸如无人驾驶汽车或机器人等设备的感觉器官,作为除手动设置参数之外的唯一自主输入。它决定了设备与外部环境之间的交互能力以及设备信息输入的准确性和丰富性。
激光雷达是一种基于非接触式激光测距技术的扫描传感器。它可以通过发射激光束来检测目标,从而获得准确的三维图像。它可以实时获得局部环境的高精度轮廓信息,测距精度可达到厘米级,具有精度高,速度快,效率高的优点,是导航,测绘等领域不可或缺的一部分。
表1各种激光雷达功能及应用场景
激光雷达主要分为一维激光雷达、二维激光雷达和三维激光雷达,不同的激光雷达所应用的环境有所不同(见表1)。
目前,随着人工智能的迅猛发展,三维激光雷达的优势越来越突出,应用范围越来越广泛。
23D激光雷达工作原理
激光雷达通过发射反射周围物体并返回传感器的激光脉冲来确定其周围的几何位置。它会计算脉冲到达物体、反射和返回到传感器所需的时间,并利用这段时间来计算物体所处的距离。扫描器通过旋转发射器(或一组发射器)来构建一个完整的点云,这样脉冲就会向多个方向发送。不同的激光雷达扫描器在许多方面各有不同,从它们的精度、它们可以扫描的面积或体积、收集了多少信息,以及在此基础上,它们必须如何安装才能对特定的应用程序有用。另一个考虑因素是有哪些软件工具可以与硬件接口和收集数据,以便以一种有用的方式呈现或处理数据。
3D激光导航的核心部件包括3D激光雷达,陀螺仪和
编码器,其核心技术主要是地图等比构造和激光数据实时匹配定位。它首先进行信息融合从而求解位置,然后通过激光测距计算机器人的全局位置坐标,根据坐标位置,实现无轨导航[2]。
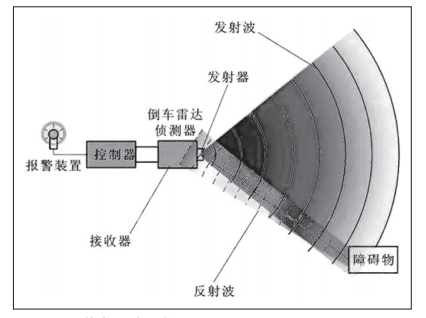
当机器人首次进入巡逻场所时,会利用3D激光雷达扫描周围环境,并通过同步地图构造和定位算法生成环境地图。在执行巡检任务中,精确匹配3D激光实时扫描地形和环境地形,以计算全球的位置信息,如图1。在一些特殊情况下,3D激光雷达扫描的地形特征很容易受到干扰,例如,在地形特征稀疏的一些室外环境中。为了保证导航的准确性和可靠性,警用巡逻机器人采用惯性导航技术来修改3D激光雷达所匹配的地形,从而达到对全局环境的了解。通过测量其加速度和角速度以及单元融合编码器的反馈信息,生成精确的轨迹递归运动模型,最后输出机器人的速度和位置信息。为了保证机器人导航的可靠性,复杂。为了保证机器人导航的可靠性,避免3D激光受到干扰,导航系统引入了冗余传感器数据交叉诊断技术来隔离干扰信号。三维激光导航的算法流程如下:读取三维点云图,惯性和里程数据;光栅化,降噪和杂质处理;计算初始图像位置;计算机器人姿势推测;计算机器人姿态观测值;计算机器人的最佳位置和方向。
图13D激光雷达工作原理
33D激光雷达在警用巡逻机器人导航中的优势
三维激光导航技术对外部环境的依赖性比较小,对定位有较高的精度,可以测量较长的距离,能处理大量的环境信息。当机器人的周围环境变化不大的时候,它可以比较稳定,对全局信息的影响很小,从而减少了对环境中固定参考的依赖。3D激光导航的主要优点是:高信噪比(SNR):点云信息量是具有相同分辨率的2D激光器的16倍。位置和姿势信息:对于恶劣的路况,可以获得统一坐标系下的点云图,并输出准确的位置信息;定位精度高:大多数情况下,位置精度可达±2cm,角度精度达到±1°,可避免障碍物避免:可以检测前方立体区域,完全避免障碍物并且可以防止跌落[3]。
4巡逻机器人关键技术
移动机器人技术和安全
监控功能是巡逻机器人的重要组成部分呢。移动系统,传感器,控制器,
报警器和
通信设备是其一般的组成部分。移动机构可以做成步行形式、轮式、履带式和混合式,它是巡逻机器人的主体,决定了巡逻机器人的运动空间和活动能力。传感系统一般采用ccD摄像头传感系统,超声波测距仪,激光测距仪,触摸和接近传感器,红外传感器等。近年来,由于通信技术,计算机技术,人工智能技术和传感技术发展飞快,对巡逻机器人的研发也进入了飞速发展的时期,迎来了比较美好的发展前景。巡逻机器人的工作环境往往是不确定和随时间变化的,所以必须考虑其安全性,可靠性和抗干扰性。因此,多传感器信息融合技术被用于检测环境,以增加信息的互补性和容错性。目前关键技术有多传感器信息融合技术,导航技术,智能控制等。下面对导航技术做具体的阐述。
巡逻机器人的导航是根据预先给出的安全任务,根据已知的地图信息进行全局路径规划,并持续感知本地工作环境信息,并在旅行过程中自行做出各种决策。随时调整姿势和姿势,避开障碍物,引导自己安全驾驶。同时,完成定时,定点或循环巡检的安全工作。机器人的工作环境可分为静态环境,动态已知环境和动态不确定环境。路径规划的研究内容可以根据机器人获取环境信息的不同方式分为基于模型的路径规划和基于传感器的路径规划。根据机器人了解环境信息的程度,可以将其分为全局路径规划和完全未知或部分未知的环境信息。可以通过传感器在线检测机器人的工作环境。用于获取有关障碍物的位置,形状和大小的信息的本地路径规划。随着应用场景数量的增加和适用环境日益复杂,警用巡逻机器人的导航技术要求越来越高。现有的导航方法主要包括磁条,激光,
GPS等,这些方法对环境的适应性和稳定性存在明显的缺陷。3D激光导航技术可以有效弥补这些缺点,它较少依赖于固定参考对象,并且对周围环境中的微小变化不敏感。因此,3D激光导航技术可以提高机器人环境的适应性和稳定性。
导航系统的关键是解决自定位,目标规划和导航规划。警用巡逻机器人的地图创建和定位是其导航研究的基础,也是实现“自治”的重要保证。全局路径动态规划是警用巡逻机器人导航中最重要的任务之一。警用巡逻机器人路径规划系统的主要要求是在环境地图中找到一条路径。确保警察巡逻机器人沿路径移动时不会与外界发生碰撞;它可以处理传感器感知环境模型中的不确定因素和路径执行中的误差,并通过使警察巡逻机器人避开外部物体来最小化对机器人传感器的感测范围的影响。可以根据需要找到最佳路径。常见的路径寻找算法包括两类:基于静态数据的路由算法和基于实时数据的路由算法[4]。静态数据路由算法是一种在历史数据的基础上,在地图网络环境不变的情况下,计算最优路径的方法。静态数据路由算法很简单,但需要一次计算才能得到最优路径。然而,该算法缺乏实时信息收集和反馈,因此不适合在复杂多变的环境中应用。
53D激光雷达在警用巡逻机器人导航中的应用
在重大节日期间,都会有警察巡逻机器人在人群密集及重要场所进行值班巡逻。起初普遍使用2D激光导航技术,但是由于2D激光导航技术对环境依赖性大,而这些场所一般面积较大,标记少,人员密集,所以导航效果差,经常出现失去问题的立场。3D激光导航技术主要用于解决这个问题,它借助垂直尺寸信息,大大提高了导航的稳定性和准确性。3D点云用于构建场景环境的地图,它所导航呈现的地面,围栏,安全棚,人群和树木都清晰可见。机器人使用这些丰富的数据准确定位其在环境中的位置,从而可以获得有关周围环境的更多信息。当警察巡逻机器人的周围环境略有变化时,对整体情况的影响显着减小,从而减少了对环境中固定参考的依赖。减少了周围环境变化引起的定位误差,大大提高了导航的稳定性和准确性。
6结语
随着高新技术的发展和功能与性能的完善,警用巡逻机器人的智能水平将进一步提高。警察安全巡逻机器人的快速发展与国家政策的大力支持,有关部门的共同努力以及技术人员的努力密切相关。在各方的支持和努力下,传统安全技术的枷锁将被打破,安防行业将从传统的安全体系向基于现代服务的智能安防体系过渡,将智能安全推向新的高度。
参考文献
[1]刘彪,柏林,周科.警用巡逻机器人导航系统设计及关键技术研究[J].中国安全防范认证,2018(3).
[2]李剑锋.巡逻保安机器人若干关键技术研究[J].毕业生,2008.
[3]杨毅,付梦印,王伟,等.移动机器人复杂环境下的3D激光点云导航方法[C].中国控制会议.2010.
[4]郑宏,王景川,陈卫东.基于地图的移动机器人自定位与导航系统[J].机器人,2007,29(4):397-402.