目前全国停车场建设情况水平参差不齐,多数采用露天出入口,光影情况复杂,更兼以车辆运行形成车牌大角度等因素,使得车牌识别难度加剧,如何提高极端场景下的车牌识别率成为业内一直全力攻克的难点。
近年来,私人汽车拥有量的持续提升带动了停车场电子收费系统的蓬勃发展。
车牌识别作为整个停车场电子收费系统的计量基础,日新月异,快速革新。随着智能
车牌识别系统逐渐发展成熟,因其适用更为广泛、基础建设要求更低、成本更为低廉等优势一步步取代原有的卡介质收费体系。
但目前全国停车场建设情况水平参差不齐,多数采用露天出入口,光影情况复杂,更兼以车辆运行形成车牌大角度等因素,使得车牌识别难度加剧,如何提高极端场景下的车牌识别率成为业内一直全力攻克的难点。
为了了解车牌识别系统在极端环境下识别率发展现状,笔者选取了市场上几家销量口碑较好的车牌识别系统,并在大角度情况的应用场景下进行试验测试,比较分析不同系统的识别效果。
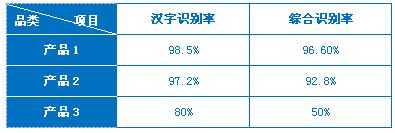
表1主要品牌大角度场景下识别率对比表
(试验相关信息:蓝牌,角度45度,样本量500个,均使用各产品最新版本。)
综合而较,产品1(火眼臻睛车牌识别一体机,以下简称“火眼臻睛”)在大角度极端场景下的识别表现更为出众。当然由此论断火眼臻睛在各种极端场景下的识别表现更为优秀,或见微知著,或管中窥豹。但是火眼在大角度场景下的优势不容忽视,众所周知,现在市面上的车牌识别产品大多采用外设触发方式,基于图像进行识别的技术,对运动状态或静止状态车辆的车牌号码进行非接触性信息采集并实时智能识别。所以要优化车牌识别产品在极端环境下的识别表现,就必须从算法着手进行改良。火眼臻睛也不例外,其优势的产生与其算法研发的实力息息相关,那么火眼臻睛算法相较其他厂商优于何处?在其他极端场景下的表现如何?
为解答这一疑惑,笔者特意走访了成都臻识科技发展有限公司(以下简称“臻识科技”),对其在极端环境下的算法研发进行详细了解。获悉,为增强算法的鲁棒性,缩小多环境和正常环境下识别效果的距离,臻识科技于2016年7月发布车牌识别一体机2.0版本,并对其算法做出了更加深入的改进,在原嵌入式神经网络算法的基础上对各极端场景车牌识别进行了优化提升。
对于多环境而言最大的差异是由于自然光变化而引起的车牌识别成像效果变差,而不同场景下成像效果的影响因素各不相同:
(1)雨雾天气能见度较低,获取的车牌图片质量会有严重的退化,因此车牌识别系统必须实现图像复原功能,即采用图像复原算法对雨雾天退化图像实现场景的再现。
图1大雨场景下识别效果图
(2)夜间在大灯的作用下,车牌的图像可能会变得一团黑一团白的情况,解决这个问题通常会用到以算法控制
补光灯的智能补光技术,同时采用双重宽动态,使其车牌识别
摄像机能够在同一画面捕捉到更多的亮面和暗部的细节,更接近于人眼睛看到的事物。
图2夜间场景下识别效果图
(3)对于顺逆光而言,可以通过局部曝光、强光抑制等智能控光技术调整摄像机的曝光参数从而实现优异的成像自动控制。
图3逆光场景下识别效果图
(4)对于因车辆运行而形成的大角度,个别厂家的车牌识别系统对于此种情况的处理效果并不理想,该问题在有转弯和出入口较宽的停车场显得尤为明显,当然通过对车牌识别摄像机的高度和角度的控制,可以减少大角度的弧度,但是并不能完全解决这个问题,还得加上算法识别,火眼臻睛车牌识别算法增加对变形字符的识别处理,专门针对这个问题做特别处理,再加上局部曝光功能,在识别大角度下的车牌效果更好。
图4大角度场景下识别效果图
每一项的算法改进,都凝聚了多点的算法创新和突破。正如臻识科技算法工程师所说,“在算法研发的过程中,每一项改进都是困难的,因为往往都伴随着其它新问题的产生。以提高逆光情况下的灵敏度为例,如果其对逆光环境识别是有益的,那么就要考虑在正常情况下,把非车牌当成车牌来识别的概率会提高、识别速度变慢等问题。”但是即使困难重重也不应该就此止步,对产品算法性能极致追求的信念应该为整个行业所坚持。
极端场景下算法的优化,极大提高了车牌识别在多环境、多角度下的识别率和适用性。一个行业的成熟进步,离不开从业者每一次尝试、努力、突破。世之奇观,在于险远;人所罕至,有志而达。正确的方向和持续的努力,才能让一个企业在这个新兴行业里砥砺奋进,占得一席之地。