近年来,以无人驾驶航空器视频巡逻为核心的道路交通安全执法新技术得到较快发展,无人驾驶航空器具有机动性、灵活性、实效性等特点,对重要路段的交通监控将更加全面,对重点车辆的全程跟踪将更加科学,对关键时段的交通态势把握将更加精准,对提高应对警情的响应能力及路面交通安全执法效能意义重大。
一、标准编制背景
近年来,以无人驾驶航空器视频巡逻为核心的道路交通安全执法新技术得到较快发展,无人驾驶航空器具有机动性、灵活性、实效性等特点,对重要路段的交通监控将更加全面,对重点车辆的全程跟踪将更加科学,对关键时段的交通态势把握将更加精准,对提高应对警情的响应能力及路面交通安全执法效能意义重大。
《基于无人驾驶航空器的道路交通巡逻系统通用技术条件》(GA/T 1505-2018)的发布,规范了无人驾驶航空器在交通管理领域的推广应用,对保障道路交通安全有序畅通具有重要作用。
二、标准关键信息解读
2.1 标准架构
《基于无人驾驶航空器的道路交通巡逻系统通用技术条件》是公共安全行业基于无人驾驶航空器的道路交通巡逻系统的唯一标准,规定了基于无人驾驶航空器的道路交通巡逻系统的术语和定义、一般要求、技术要求、检验方法和检验规则,适用于基于无人驾驶航空器的道路交通巡逻系统的生产和检验。
从标准的架构可知,标准对基于无人驾驶航空器的道路交通巡逻系统从组成分类到生产检验的全过程都提出了具体明确的要求,特别是技术要求部分,对系统装备建设和行业发展发挥了指导性作用。
2.2 术语和定义
标准首先明确基于无人驾驶航空器的道路交通巡逻系统及其关键部件无人驾驶航空器的定义。
2.2.1 无人驾驶航空器
参照公安部特种警用装备标准化技术委员会归口的《警用无人驾驶航空器系统 第1部分:通用技术要求》(GA/T 1411.1-2017)标准的术语和定义,本标准将无人驾驶航空器定义为没有机载驾驶人操作的航空器,包括自主航空器和遥控驾驶航空器,并按照升力结构分为多旋翼、固定翼和垂直起降固定翼三类无人驾驶航空器。
图1 三种类型的无人驾驶航空器
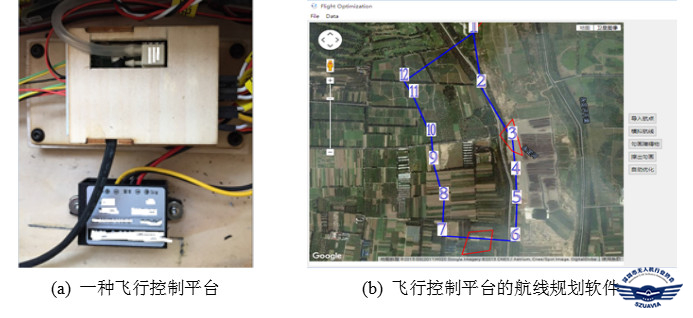
2.2.2 飞行控制平台
飞行控制平台是用于实现无人驾驶航空器任务规划、飞行控制、航迹显示、飞行参数记录等功能的设备,是控制无人机正常飞行的关键软硬件设备。
图2 飞行控制平台及其航线规划软件
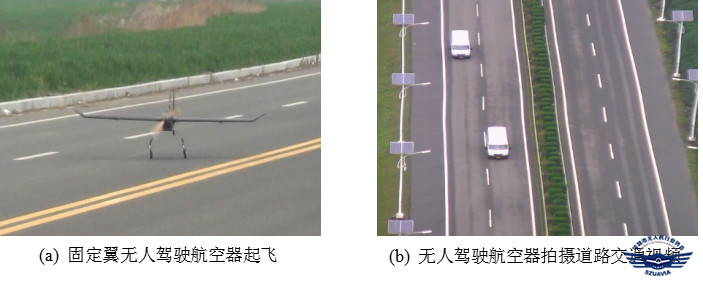
2.2.3 基于无人驾驶航空器的道路交通巡逻系统
基于无人驾驶航空器的道路交通巡逻系统是使用无人驾驶航空器,开展道路交通视频巡查、违法行为取证以及流量检测等工作的装备,是以无人驾驶航空器为前端载体、用于道路交通巡逻的警用装备。
图3 无人驾驶航空器对道路交通进行视频巡逻
2.3 要求
从技术应用层面分析,基于无人驾驶航空器的道路交通巡逻系统必须满足一定的产品形式、功能性能、操作方式、安装维护等要求,才能拓展道路交通视频巡逻范畴,加快警情应对的响应速度,真正提高路面交通安全执法效能。为此,标准第4部分和第5部分对基于无人驾驶航空器的道路交通巡逻系统的要求进行了全面详细的阐述,包括一般要求、飞行子系统、航拍子系统、信息存贮和传输子系统以及后台处理子系统的技术要求等。
2.3.1 组成
标准的一般要求中,将基于无人驾驶航空器的道路交通巡逻系统的组成分为4个部分:飞行子系统、航拍子系统、信息存贮和传输子系统以及后台处理子系统。其中飞行子系统的主体为无人驾驶航空器,也是航拍子系统的载体;信息存贮和传输子系统同时在航拍子系统和后台处理子系统中存贮视频图像并传输信息;后台处理子系统是整个系统的信息处理、决策管理部分。
2.3.2 飞行子系统
飞行子系统包括无人驾驶航空器本体,以及控制无人驾驶航空器的飞行控制平台。标准针对交通管理部门对交通视频巡逻的实际需求,对无人驾驶航空器的起飞工作准备时间、起降、飞行模式、平飞速度、高度、续航时间、飞行半径、电源、空间定位、返航功能提出了具体要求。其中,最大实际使用高度是指无人驾驶航空器距离地面的高度而非海拔高度,电源采用的是电池供电方式,空间定位包括水平平面和垂直方向的定位。此外,标准还对飞行控制平台提出了航线规划与控制、飞行参数设定两方面的要求,特别明确了航线规划不能与禁飞区冲突、不宜设置在道路正上方等安全要求。
2.3.3 航拍子系统
航拍子系统是基于无人驾驶航空器的道路交通巡逻系统的“眼睛”,包括获取视频图像的机载成像装置和控制其转动的云台。标准参考路面交通视频监控的一般成像要求,对机载成像装置的分辨率、视频真速度、视场角、颜色还原性、失真等方面提出了性能指标,对云台的固定、防抖、旋转控制能力作出了规定。此外,根据交通管理部门对无人驾驶航空器巡逻过程中视频图像对交通事件捕获、违法行为识别的需求,标准也对航拍子系统的视频巡查、违法行为取证、交通流量检测、目标跟踪、声光提示等功能提出了要求,无人驾驶航空器需要能够对不按规定车道行驶、违法占用应急车道、倒车、逆行等常见交通违法行为进行识别取证,并具有车辆号牌识别功能。
2.3.4 信息存贮和传输子系统
考虑到现有视频传输技术无法保证无人驾驶航空器飞行过程中全码率传输航拍子系统拍摄的视频图像,标准要求信息存贮和传输子系统在航拍子系统和后台处理子系统分别存贮视频和图像文件。这种情况下,航拍子系统可以存贮原始图像和视频文件,后台处理子系统存贮实时发回的低码率视频图像文件。标准对视频图像数据的格式和编码方式、航拍子系统和后台处理子系统的存贮容量、以及存贮的内容均作出了规定。在信息传输方面,标准对传输的信息内容、距离、码率、使用的信道频率也做出了相关规定。
2.3.5 后台处理子系统
后台子系统在基于无人驾驶航空器的道路交通巡逻系统中起远程控制、信息处理、操作交互的作用,形式上可以是地面控制站或者远程后台服务器等。标准要求后台处理子系统能够实时显示、回看、存贮无人驾驶航空器的飞行状态信息、航拍子系统的视频图像信息等;能够向飞行子系统发送远程命令,并将无人驾驶航空器的飞行位置在电子地图上展示;具有信息安全、共享、管理等常用信息系统功能等。
2.3.6 其他要求
标准对无人驾驶航空器的飞行安全提出了基本要求,包括自动避让障碍物、无害迫降、自动返航和降落以及内置禁飞区等。
标准对基于无人驾驶航空器的道路交通巡逻系统的可靠性作出了基本规定,明确了各种类型无人驾驶航空器的抗风等级和平均无故障时间。
标准对基于无人驾驶航空器的道路交通巡逻系统的环境适应性进行了规定,包括电磁兼容性、气候环境适应性和机械环境适应性。例如,在电磁兼容性方面,基于无人驾驶航空器的道路交通巡逻系统静电放电抗扰度应能满足标准GB/T 17626.2的a级要求、射频电磁场辐射抗扰度应能满足标准GB/T 17626.3的a级要求;在气候环境适应性方面,无人驾驶航空器的工作温度范围应能达到-20至60℃、能够在小雨条件下正常工作、能够在海拔4000m地区正常作业等;在机械环境适应方面,无人驾驶航空器应能在指定振动、冲击、跌落条件下保持部件不变形、无损坏,插头接口无松动、无接触不良等,能够正常工作。
三、标准实施要点
标准的发布和实施为各地公安交通管理部门无人驾驶航空器及其巡逻系统的装备建设、管理工作提供了依据,为行业健康发展指明了方向。在标准贯彻实施过程中,应注意以下几点:
注重标准内涵的宣贯。只有把标准制定的背景以及无人驾驶航空器带来的道路视频巡逻的技术变革理解透彻,才能真正地重视无人驾驶航空器及其巡逻系统的引入工作,指导相关装备建设和实战行动;
严格把控产品的质量。标准的颁布为行业发展制定了规范,为政府采购提供了依据,各地应以标准为立足点,严格管控产品质量,确保高品质、高性能、高安全的装备配置到一线交警手中;
加强使用人员的培训。确保路面执勤执法的交警与协管员准确理解、正确使用和熟练掌握基于无人驾驶航空器的道路交通巡逻系统,提高装备的执行效率和使用效果,拓展对道路交通视频监控的范畴。
结束语
随着我国交通基础设施的持续发展、公路里程的不断增加,交通管理部门路面巡逻、执勤执法等工作面临巨大压力,恰有必要引入无人驾驶航空器作为新型交通视频巡逻载体,提升路面视频监控的机动性、灵活性、实效性。本标准的颁布实施,将有助于基于无人驾驶航空器的道路交通巡逻系统的生产、制造及应用,对提升我国交通视频监控科技水平、警情应对响应能力及路面交通安全执法效能具有重要意义。