车路协同中,侧重的是车和路之间的信息交互。车把自身的行驶轨迹、位置、速度等信息“告诉”路;而路端通过多维感知和协同计算,再把相关的碰撞信息、预警信息等内容“告诉”车;如果接收信息的是人类驾驶员,车载智能设备会以语音或画面的形式呈现路端给过来的信息,作为驾驶员的“决策依据”;如果接受路端信息的是自动驾驶车辆,则会由计算单元做接下来的预测、规划和决策。
在“智慧交通”发展大方向下,以“车路协同”为代表的“黑科技”正在不断落地。以下是车路协同下的两个典型应用场景:
A车,你前方200米有行人突然横穿马路,右前方的车辆会遮挡住你的视野,请注意减速避让
A车:OBU收到,已减速
B车,在你的路线上前方5公里处有车祸,建议提前绕行。
B车:OBU收到
以第一个场景为例,当车辆在路上正常行驶的时候,因为左右两边的障碍物产生了盲区,而在盲区后有人或者车辆突然横穿马路,一般当车主发现的时候,距离已经很近,车祸可能已经不可避免,因为事发突然,令人猝不及防。
这种情况尤以行人和非机动车更为常见,在交叉路口、公交车站、道路两侧停车较多的居民区等路段较易多发。而车路协同系统可以提供车辆感知设备探测不到的危险信息,大大降低因以上场景衍生的交通事故隐患。
第二个则体现了“超视距”场景,在驾驶员看不到、车载设备监测不到的远方,那里的路端设备掌握实时路况并传给行驶中的汽车。
以上几种场景下,“车路协同”是如何实现的呢?
首先车辆要安装车载单元(OBU),可以实现多传感器数据融合,将路端传过来的信息准确高效地告诉“驾驶员”,保证车辆在各种复杂的情况下稳定、安全行驶。同时,该OBU搭载V2X模组,为车辆与其他车辆及基础设施之间提供低时延、高可靠性、高密度的信息传输,保障各交通参与方进行有效的信息互通。
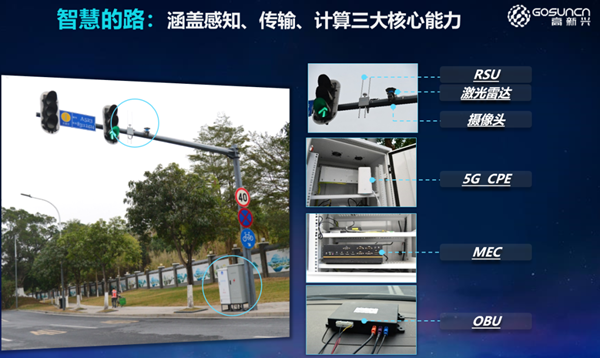
简单来说,就是雷达、摄像头等路侧设备实时监测、采集路面动态信息(包括车辆、行人、
信号灯等);边缘计算单元(MEC设备)接收以上信息,对其状态、坐标、行动轨迹等进行计算处理、解析、翻译;RSU将MEC翻译好的信息发送给车上的OBU(车载单元);OBU将信息告诉“驾驶员”,车辆能够及时预知碰撞风险,汽车的自动驾驶系统也会发出相应指令,控制车辆的速度与转向等,降低驾驶员因为视觉盲区带来的各种风险。
车路协同将昂贵的设备从智能车移到智慧路上,路侧感知设备实时感知路况,及时通知车辆,一套设备就能覆盖经过的所有车,大大降低了车载传感器成本。由远处的路侧设备超视距感知,告诉你那边什么情况。另外,作为智慧交通的综合管理支撑平台,V2X云平台汇集各种实时的动态信息,解决智能网联汽车存在的信息孤岛,难以互联协同、有效管控的问题。
这其中5G网络为信息搭建高可靠性的快速通道,保证车端、路端与云端的信息实时交互。高新兴车联网V2X平台依托大数据采集汇集和计算能力,构建各类交通事件监测和发布模型,进行云端统一协调和管控,同时,打造车联网V2X平台场景应用池,布置并丰富V2I、V2V、V2P等车路协同场景应用。
车、路信息交互 5G网络做支撑
因此,车路协同中,侧重的是车和路之间的信息交互。车把自身的行驶轨迹、位置、速度等信息“告诉”路;而路端通过多维感知和协同计算,再把相关的碰撞信息、预警信息等内容“告诉”车;如果接收信息的是人类驾驶员,车载智能设备会以语音或画面的形式呈现路端给过来的信息,作为驾驶员的“决策依据”;如果接受路端信息的是自动驾驶车辆,则会由计算单元做接下来的预测、规划和决策。
同时,基于5G网络的超低时延、高稳定性以及大带宽的特点,能够保证信息的实时与准确传递,实现汽车自动驾驶系统反应效率更快、操纵精度更准确。