Ŀ����ټ����ǻ������Ӿ������һ����Ҫ�о���֧�����ں���ͼ������ģʽʶ���˹����ܼ��Զ����Ƶȶ�ѧ�������о��ɹ�����Ҫ������Ƶ������������Ƶ����ͼ�����н���������������ʵ���˶�Ŀ����Զ���⡢��λ���٣�Ϊ�߲���Ƶ��Ŀ�����Ϊ����;����ṩ�ײ����ͷ������ݡ�
����Ŀ����ټ����ǻ������Ӿ������һ����Ҫ�о���֧�����ں���ͼ������ģʽʶ���˹����ܼ��Զ����Ƶȶ�ѧ�������о��ɹ�����Ҫ������Ƶ������������Ƶ����ͼ�����н���������������ʵ���˶�Ŀ����Զ���⡢��λ���٣�Ϊ�߲���Ƶ��Ŀ�����Ϊ����;����ṩ�ײ����ͷ������ݡ�
��������Ҫ
����Ļ��������ܹ��жϳ������ض������Ŀ�꣬�����ܹ�����Ŀ��Ĺ켣����Ϊ���������һ�Ǿ�̬�����µ�Ŀ����٣����Ƕ�̬�����µ�Ŀ����١�
����һ����̬�����µ�Ŀ����ٷ���
����1����Ŀ�꣺Ŀ����ٻ����Է�Ϊ��Ŀ��ĸ��ٺͶ�Ŀ��ĸ��١���Ŀ��ľ�̬�����µ�Ŀ�����ָ��������ͷ�ǹ̶���ijһ��λ�������۲����ҰҲ�Ǿ�ֹ�ġ�ͨ�����ñ�����ַ������ȶԱ������н�ģ��Ȼ�����Ƶ���ж�ȡͼ�����dz�֮Ϊǰ��ͼ����ǰ��ͼ���뱳��ͼ������Ϳ��Եõ�������Ұ��Ŀ�����塣����Ŀ���������ͨ����Ŀ����ͨ�����������Ŀ�Ķ���������Ŀ��Ĵ�С��������Ŀ������ĸ߿��ȵȡ�Ŀ���λ����Ϣ�ɲ���ͶӰ�ķ�ʽ����λ��
����2����Ŀ�꣺��̬�����µĶ�Ŀ����٣���Ҫȷ��ÿ��Ŀ���������λ�ã��˶������ٶȵ���Ϣ��
����3��Ԥ���������ڻ�õ�ͼ���ܻ�������������Ҫ��ͼ����һЩԤ���������˹ƽ������ֵ�˲������߽���һЩ�Ҷ������ͼ����ǿ�IJ�����
����������̬�����µ�Ŀ�����
��������ͷ��
��̨�����µ���ת����ʹ�������ɼ���ͼ��ʱ���ڱ仯�����ԣ���������Ŀ����ٹ�����˵�������DZ仯��Ŀ��Ҳ���������������˶��ģ����Ը������������Ѷȡ�
����Ŀǰ����������ķ����ǣ����ٹ��̣�������ͷ��ͬƫ�������ȡ�����ɱ���ͼƬ����������ͼƬ��D�D>����ͷ���̶ֹ�ʱ��ȡ�õ�ǰ֡ͼƬ����ͼƬ���еı���ͼ��ƥ�䣬�������(�ҶȲ�֣�)�����Ŀ��D�D>Ŀ��������ȡ�D�D>ʵʱ��õ�ǰ֡ͼƬ�����ø����㷨��̬����Ŀ�ꡣ
������ȡ������һ���ѵ㣬�������������ɫ�ռ�����ķ��������ݲ�ɫͼ���ڲ�ͬ����ɫ�ռ������ͬһ������ֳ���̬ͬ�ԣ�����Ŀ�������ڲ�ͬ����ɫ�ռ�����зֽ⣬������Щ�ؼ�������Ϣ�����ںϣ��Ӷ��ҳ��б�Ŀ��ı���������
�������ٹ����в��õĸ��ַ���˵����
����1����0��360�Ȳ�ͬƫ��ʱ����ñ���ͼƬ���ɽ��л�ϸ�˹������ģ������ͼƬ�⣬�Ը����Ǻ�ƫת�Dz�ͬ��־ÿ�ű���ͼƬ���Ա�ƥ��ʹ�ã�
����2��������ֻ��Ŀ��Բ��ͼ����Ҫ����ƽ����ȥ��ȴ�����ȥ���������أ�
����3����Ŀ����ö���ɫ�ռ䣨HSV��YUV��������ȡ���Բ�ͬ��ɫ�ռ���������루AND�����õ�Ŀ���������Ը��õ��ڵ�ǰ֡ͼƬ���ҵ�Ŀ�ꣻ
����4��ʵʱ�õ��ĵ�ǰ֡ͼƬ�����л�ϸ�˹��ģ���ų���Ҷҡ��������ı����仯��
����5�������㷨�ɲ��ö��ӿ�ƥ�䷽����camshift�����ȡ�
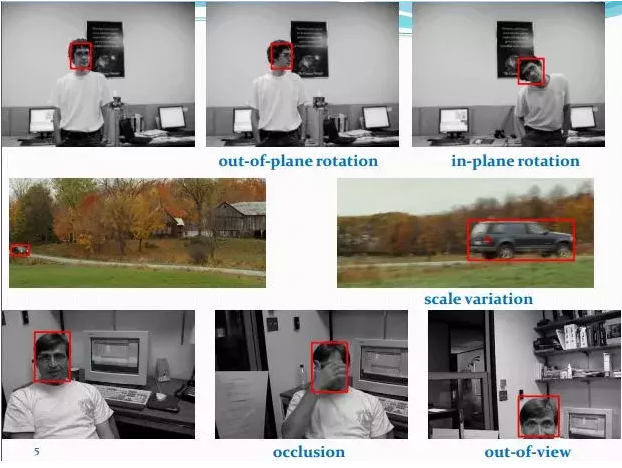
����ͨ��Ŀ��������ټ����ѵ�(������VALSE��slides)����۱��Σ����ձ仯�������˶����˶�ģ�����������Ƹ��ţ�ƽ������ת��ƽ������ת���߶ȱ仯���ڵ��ͳ���Ұ�������
����Ŀ���Ӿ�����(VisualObjectTracking)����ұȽϹ��Ϸ�Ϊ�����ࣺ����(generative)ģ�ͷ������б�(discriminative)ģ�ͷ�����Ŀǰ�Ƚ����е����б������Ҳ�м�����tracking-by-detection��Ϊ���ֻش�������ԣ����¼��ܡ�



